Hengjiang Intelligent Technology Co., Ltd. ialah pengilang profesional dan pembekal sistem robot penaik dan peralatan automasi industri gred makanan. Portfolio produk kami merangkumi robot Delta dan SCARA kendiri, stesen kerja robotik fleksibel dan sistem pengisihan dan pembungkusan talian penuh — semuanya direka bentuk untuk operasi berkelajuan tinggi, berketepatan tinggi, kebersihan dalam persekitaran pengeluaran makanan roti dan sejuk beku moden. Sama ada anda sedang mencari robot unit tunggal untuk mengautomasikan satu nod proses atau barisan turnkey lengkap untuk pengeluaran donat, pizza atau tart telur, Hengjiang menyediakan penyelesaian modular berskala yang mengurangkan kos buruh, menghapuskan kesilapan manusia dan meningkatkan daya pemprosesan untuk memenuhi permintaan piawaian kilang pintar.
Seperti yang dialamipengeluar robot delta, Hengjiang mereka bentuk dan menghasilkan manipulator selari siri HJ-D11003-1 dari bawah ke atas, meliputi struktur mekanikal, perisian tegar kawalan gerakan dan perkakas pengesan akhir. Robot delta beroperasi pada seni bina kinematik selari: tiga lengan yang didorong secara bebas disambungkan ke bingkai atas tetap, dan semua penggerak sendi kekal pada tapak pegun dan bukannya bergerak dengan pemasangan lengan. Ini menjadikan jisim bergerak sangat rendah, yang merupakan sebab utama robot delta boleh mencapai kadar kitaran dan pecutan yang tidak dapat dipadankan oleh robot lengan bersiri.
Seni bina teknikal siri HJ-D11003-1: Tiga lengan atas didorong oleh motor servo yang dipasang secara sepusat pada plat asas. Pautan bawah gentian karbon atau aluminium menghantar gerakan ke platform bergerak pusat melalui sambungan bola dan soket, menghapuskan tindak balas. Varian paksi bukan berputar standard mengendalikan pick-and-place XYZ tulen, manakala varian paksi berputar menambah paksi keempat (paksi R) pada pengesan akhir, membolehkan pembetulan orientasi semasa memetik — kritikal apabila produk tiba pada sudut rawak pada penghantar suapan. Kapasiti muatan menyasarkan produk ringan (biasanya di bawah 3 kg seunit), dengan diameter sampul surat kerja biasanya dalam julat 800–1,100 mm dan lejang menegak sehingga 300 mm.
Penyepaduan kawalan dan penglihatan: Setiap robot dipasangkan dengan kabinet pemacu servo dan pengawal robot khusus yang menjalankan perisian perancangan gerakan Hengjiang. Penglihatan mesin dikendalikan oleh kamera industri yang dipasang secara paksi di atas tali pinggang penghantar. Sistem penglihatan menstrim kedudukan produk dan data sudut kepada pengawal dalam masa nyata, yang kemudiannya mengira tugasan pengambilan robot individu dalam kluster berbilang robot. Protokol komunikasi antara hos penglihatan dan pengawal robot menggunakan Ethernet industri standard (EtherCAT atau Modbus TCP), membolehkan penyepaduan dengan sistem SCADA pihak ketiga tanpa perisian tengah tambahan.
Pertimbangan reka bentuk kebersihan: Semua permukaan yang terdedah kepada zon makanan menggunakan pengikat keluli tahan karat 304 atau 316 dan perumah pautan polimer selamat makanan. Kepungan motor bertaraf IP65 menghalang kemasukan wap dan air basuh. Pengurusan kabel menghalakan pendawaian melalui saluran saluran tertutup, menghapuskan permukaan mendatar di mana serpihan boleh terkumpul.
Produk yang berkenaan: donat, ladu, roti kukus, croissant, tart telur, kepingan coklat dan barangan bakar atau beku lain yang terbentuk atau dibentuk. HJ-D11003-1 boleh didapati dalam kedua-dua konfigurasi paksi tidak berputar dan berputar; Lihat setiap halaman butiran model untuk parameter kinematik yang tepat, sampul jangkauan dan penilaian muatan.
Untuk syarikat yang menilaipengeluar robot deltadi seluruh dunia, Hengjiang menawarkan ujian penerimaan kilang (FAT), sokongan pentauliahan jauh dan kerjasama OEM/ODM. Demonstrasi video rujukan robot delta dalam barisan pengisihan donat dan pizza hidup boleh didapati diperpustakaan video robot penaik.
PemahamanHarga robot SCARAfaktor adalah penting sebelum komited kepada projek automasi. Robot SCARA Hengjiang (Lengan Robot Perhimpunan Pematuhan Selektif) dibangunkan dan dihasilkan secara bebas, yang bermaksud harga mencerminkan nilai kejuruteraan sebenar dan bukannya markup pengedar. Barisan semasa termasuk empat model — HJ-SC1250-R, HJ-SC1050-R, HJ-SCD0625A dan HJ-SCD7840 — dibezakan mengikut jangkauan lengan (625 mm hingga 1,250 mm), muatan (5 kg hingga 30 kg) dan lejang paksi-Z.
Apakah yang menentukan harga robot SCARA? Lima faktor utama mengawal kos akhir sistem SCARA gred makanan:
Jangkauan lengan dan kelas muatan: Jangkauan yang lebih panjang dan muatan yang lebih tinggi memerlukan komponen struktur yang lebih berat dan pemacu servo yang lebih besar, secara langsung meningkatkan kos unit. HJ-SC1250-R, sebagai contoh, meliputi jangkauan 1,250 mm dengan kapasiti muatan 30 kg, sesuai untuk pengendalian lapisan palet, manakala HJ-SCD0625A menyasarkan pengisihan ketepatan pada jangkauan 625 mm dengan sampul muatan yang lebih ringan dan peringkat harga yang lebih rendah.
Kiraan paksi: Robot SCARA standard beroperasi pada empat paksi (putaran J1, putaran J2, Z linear, putaran pergelangan tangan R). Sesetengah konfigurasi menambah paksi kelima untuk tugas orientasi yang kompleks. Paksi tambahan meningkatkan kiraan servo dan kerumitan pengawal, menjejaskan harga.
Kemasukan sistem penglihatan: Unit robot kendiri yang disebut harga tanpa sistem penglihatan mewakili harga asas. Apabila digabungkan dengan modul penglihatan mesin bersepadu Hengjiang — kamera industri resolusi tinggi, pencahayaan cincin LED, unit pemprosesan imej masa nyata dan perisian penentukuran — harga sistem meningkat tetapi memberikan penyelesaian turnkey sedia untuk penggunaan segera.
Konfigurasi pemasangan: Siri HJ menyokong pemasangan yang dipasang di siling (terbalik) sebagai standard, yang mengoptimumkan ruang lantai dan meningkatkan kebolehcapaian untuk pembersihan. Bingkai pendirian lantai tersuai atau pelekap gantri untuk susun atur khas membawa kos kejuruteraan dan fabrikasi tambahan.
Sistem kawalan dan lesen perisian: Kabinet kawalan pemacu bersepadu Hengjiang menggabungkan penguat servo, pengawal gerakan robot, geganti keselamatan dan skrin sentuh HMI dalam satu kandang. Platform perisian yang dibangunkan sendiri menyokong pemantauan jauh, kemas kini perisian tegar over-the-air dan pengurusan resipi untuk barisan berbilang produk, semuanya termasuk dalam pakej standard.
Spesifikasi teknikal SCARA utama: Ketepatan kedudukan berulang ialah ±0.025 mm merentasi keempat-empat paksi, disahkan melalui ujian ketahanan 100,000 kitaran. Kelajuan linear pengesan akhir maksimum mencapai 2 m/s. Keseluruhan badan robot mempunyai berat kira-kira 40 kg, memudahkan keperluan struktur overhed. Semua sendi dimeteraikan kepada minimum IP54, dengan IP65 tersedia untuk persekitaran pencucian.
Untuk harga terperinci bagi setiap model dan konfigurasi, hubungi pasukan jualan Hengjiang melaluiSiasatan dalam talianhalaman.
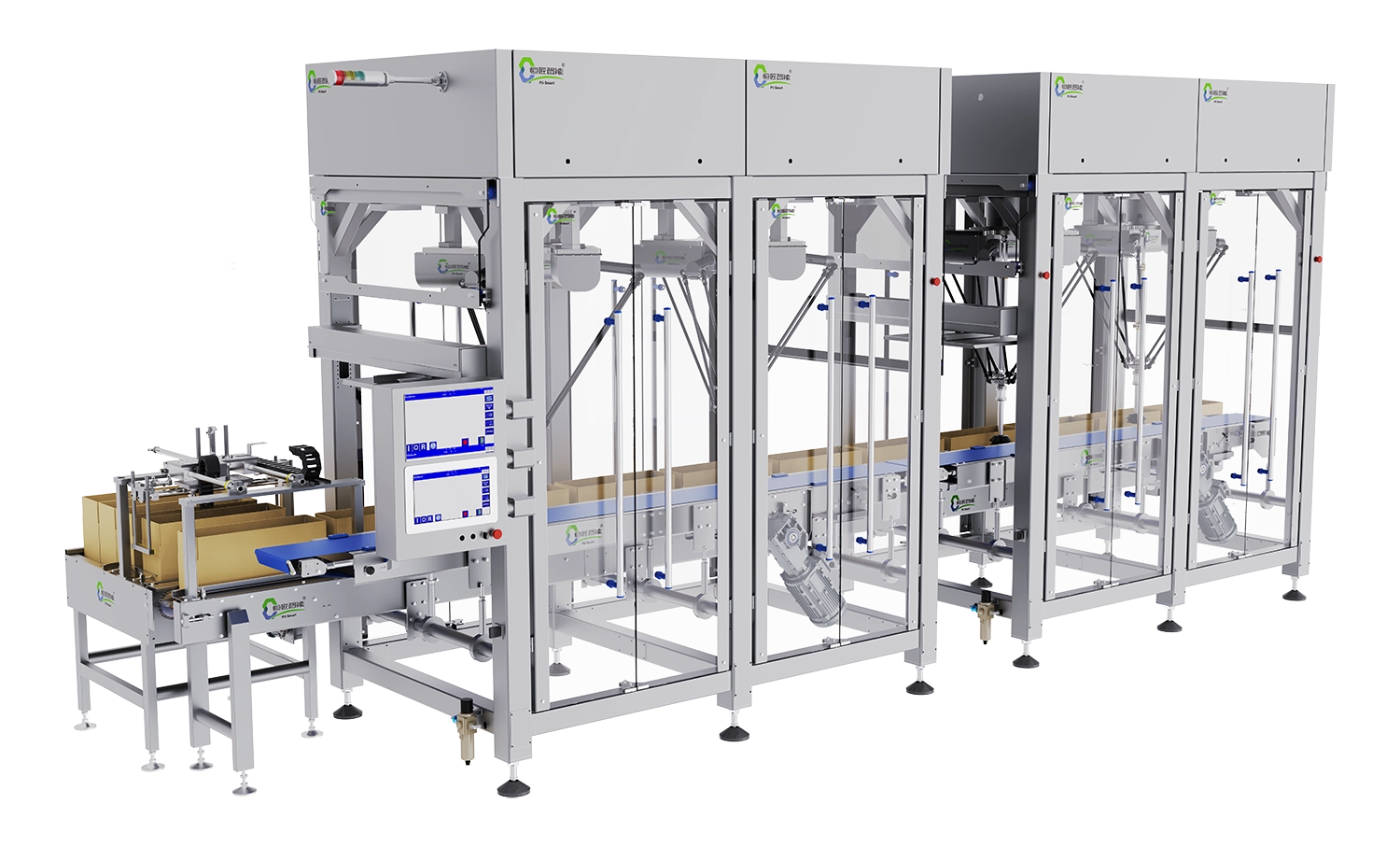
YangStesen kerja robot SCARAdari Hengjiang ialah sel automasi pra-kejuruteraan yang menyepadukan robot SCARA gred makanan, penglihatan mesin, penghantar masuk dan suapan keluar, bingkai keluli tahan karat, pelindung keselamatan dan kabinet kawalan bersatu ke dalam satu unit yang boleh digunakan. Penyepaduan peringkat stesen kerja ini mengurangkan masa kejuruteraan di tapak dengan ketara berbanding dengan membeli komponen individu dan menyepadukannya secara bebas.
Seni bina stesen kerja teras: Susun atur sel meletakkan robot SCARA di tengah di atas penghantar suapan. Stesen penglihatan di hulu sampul kerja robot menangkap imej setiap produk masuk. Koordinat yang diproses dimajukan kepada pengawal robot melalui EtherCAT dalam kependaman 20 ms, memastikan robot menerima data pengambilan yang tepat sebelum produk mencapai zon pemilihan. Penghantar suapan keluar pada satu atau kedua-dua belah membawa produk yang disusun ke stesen pembungkusan hiliran atau pemuatan dulang.
Aplikasi utama yang ditunjukkan di Hengjiang ialah Stesen Kerja Pengisihan dan Susunan Cangkerang Tart Telur Beku. Dalam konfigurasi ini, kulit tart telur beku yang baru dinyahbentuk tiba di tali pinggang suapan dalam orientasi rawak. Sistem penglihatan mengenal pasti kedudukan tengah dan sudut orientasi setiap cangkerang. Robot SCARA memilih setiap cangkerang dan meletakkannya ke dalam kedudukan tindanan yang ditetapkan dengan kebolehulangan ±0.02 mm, membentuk timbunan seragam kiraan pratetap yang kemudiannya dipindahkan ke stesen pembungkusan. Sel mencapai kadar pemprosesan yang melebihi apa yang boleh dihasilkan oleh tiga hingga empat pengendali manual, dengan pencemaran sifar daripada sentuhan manusia.
Butiran pembinaan yang bersih: Bingkai stesen kerja dikimpal sepenuhnya keluli tahan karat 304 dengan permukaan yang digilap secara elektro. Tali pinggang penghantar menggunakan bahan PU gred makanan. Semua komponen pneumatik untuk penggenggam pengesan akhir dipasang di dalam perumahan lengan robot tertutup, tidak terdedah secara luaran. Kabinet elektrik dipasang di luar zon makanan untuk mengelakkan haba dan gangguan elektromagnet daripada menjejaskan kualiti produk.
Kebolehskalaan: Satu stesen kerja SCARA boleh dikendalikan secara kendiri atau rangkaian ke dalam stesen kerja yang lebih besarBarisan pembungkusan pengisihan robot SCARAItu termasuk pemuatan dulang automatik, kadbod dan pembungkusan kes. Seni bina komunikasi modular (serasi OPC-UA) membolehkan stesen kerja melaporkan data pengeluaran — kiraan kitaran, kadar tolak, telemetri daya penggenggam — kepada sistem MES atau ERP pusat.
Stesen kerja ini juga merupakan laluan penyepaduan peringkat permulaan untuk pengeluar yang ingin mengautomasikan satu langkah proses sebelum komited kepada penyelesaian talian penuh. LihatPerkhidmatan dan sokonganbahagian untuk pemasangan, ujian penerimaan dan butiran latihan pengendali.
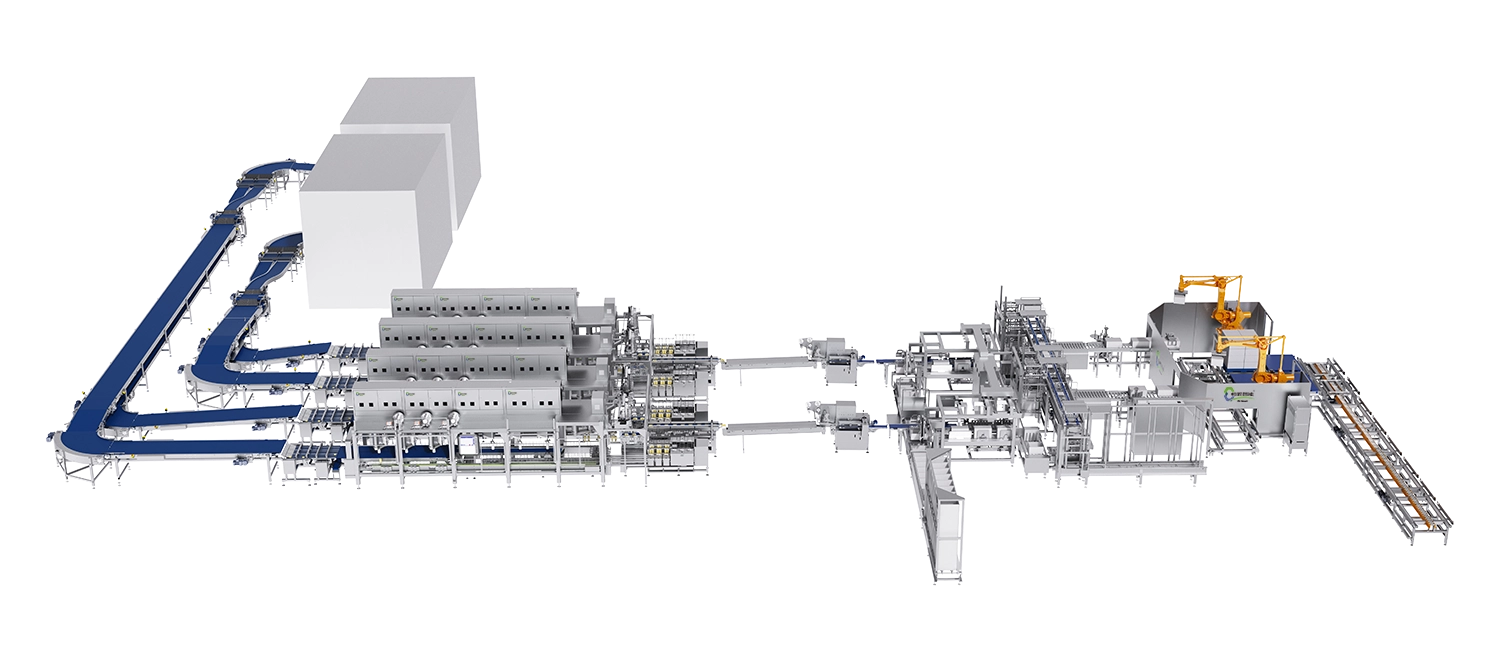
YangStesen Kerja Robot Deltadari Hengjiang mengkonfigurasi satu atau lebih robot delta HJ-D11003-1 di atas tali pinggang penghantar kongsi, dengan sistem penglihatan bersatu yang menguruskan tugasan pilih merentas semua robot dalam kluster. Seni bina berbilang robot ini ialah pendekatan standard industri untuk mencapai daya pemprosesan yang sangat tinggi pada talian suapan masuk yang bergerak pantas di mana robot tunggal akan menjadi kesesakan.
Stesen kerja delta unit tunggal: HJ-D11003-1 tunggal yang dipasang di atas tali pinggang selebar 500–800 mm mengendalikan produk yang tiba pada kadar sehingga kira-kira 60–80 pilihan seminit bergantung pada geometri produk dan masa kitaran penggenggam. Sistem penglihatan menerangi tali pinggang dengan tatasusunan LED berstruktur, menangkap imej pada kadar pencetus yang diprogramkan, dan mengeluarkan kedudukan XY serta data sudut untuk setiap produk yang dikesan. Pengawal robot mengekalkan barisan pilihan yang belum selesai, melaksanakannya dalam urutan yang meminimumkan jarak perjalanan lengan (penjadualan jiran terdekat), memaksimumkan pemprosesan yang berkesan.
Kluster delta berbilang unit: Apabila kelajuan talian atau ketumpatan produk melebihi kapasiti robot tunggal, dua, tiga atau lebih robot delta disusun secara bersiri di sepanjang arah penghantar. Hos penglihatan bersama memberikan setiap produk masuk kepada robot tertentu berdasarkan zon kedudukan dan ketersediaan robot (pengimbangan beban). Jika satu robot sibuk menyelesaikan pilihan sebelumnya, tugasan bergolek ke hadapan ke unit seterusnya yang tersedia. Penjadualan koperasi ini memastikan bahawa tiada produk keluar dari zon pengambilan tanpa dikendalikan dalam keadaan operasi biasa.
Aplikasi pengisihan donat: Dalam aplikasi Stesen Kerja Pengisihan Robot Donat, Hengjiang menggunakan kluster delta berbilang robot untuk menyusun donat yang baru digoreng atau dibekukan mengikut saiz, bentuk dan jarak ke dalam dulang atau acuan pembungkusan. Modul pengesanan kecacatan sistem penglihatan secara serentak memeriksa donat yang rosak atau cacat, mengalihkan penolakan ke lorong yang berasingan. Seluruh sel antara muka secara langsung dengan HengjiangBarisan pengeluaran membentuk donathuluan, mewujudkan aliran automatik berterusan daripada pembentukan doh melalui pengisihan dan pembungkusan.
Pilihan perkakas pengesan akhir: Hengjiang membekalkan penggenggam proprietari yang dipadankan dengan produk roti biasa — cawan sedutan vakum dalam silikon gred makanan untuk produk permukaan licin, jari mekanikal adaptif untuk bentuk yang tidak teratur dan alat tatasusunan jarum untuk pastri berlapis halus. Sistem perubahan pantas pengesan akhir membolehkan pengendali menukar jenis produk dalam masa kurang dari dua minit tanpa alatan.
Keselamatan dan pematuhan: Setiap stesen kerja termasuk langsir cahaya pada semua titik akses pengendali, litar hentian kecemasan dan modul geganti bertaraf keselamatan yang mematuhi ISO 13849 PLd. Perisian kawalan menguatkuasakan had kelajuan dan daya apabila tirai cahaya keselamatan disekat sebahagiannya (mod kelajuan berkurangan) dan bukannya melakukan hentian keras, meminimumkan gangguan pengeluaran semasa kemasukan pengendali yang singkat.
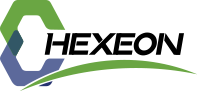
YangBarisan pembungkusan pengisihan robot SCARAdari Hengjiang ialah sistem pengeluaran lengkap yang mengambil produk makanan yang tidak diisih di salur masuk dan menghantar kadbod atau dulang yang diisi dan tertutup di cawangan keluar — tanpa campur tangan manual antara kedua-dua titik ini. Penyelesaian peringkat talian ini mewakili tahap penyepaduan tertinggi dalam portfolio robotik Hengjiang dan direka untuk pengeluar yang menjalankan SKU volum besar dengan keperluan konsistensi output yang ketat.
Seni bina sistem: Garisan ini terdiri daripada enam zon berfungsi yang disusun dalam susun atur linear atau berbentuk L untuk disesuaikan dengan ruang lantai kilang yang tersedia. Zon 1 ialah penampan suapan, di mana produk daripada proses penaik atau pembekuan huluan diterima ke penghantar penyebaran yang menyebarkannya ke dalam satu lapisan untuk pemeriksaan penglihatan. Zon 2 ialah stesen pemeriksaan penglihatan, yang melakukan pemeriksaan produk 100% untuk dimensi, bentuk, keseragaman warna dan kecacatan permukaan. Zon 3 ialah zon pengambilan robot SCARA, di mana satu atau dua robot SCARA melakukan pengambilan dan tempat yang diselaraskan bagi produk yang diterima ke dalam dulang atau acuan pembungkusan yang diletakkan pada penghantar pengindeksan selari. Zon 4 mengendalikan pengesahan pengisian dulang melalui skala semakan berat yang disepadukan ke dalam suapan keluar zon robot. Zon 5 ialah modul penutup dulang atau kadbod automatik, yang menggunakan penutup filem atau kertas dan mengelak tepi dulang. Zon 6 ialah modul pembungkusan dan palletizing kes, yang mengumpulkan dulang tertutup ke dalam kes penghantaran dan menyusunnya pada palet.
Permohonan: Barisan Pengeluaran Pengisihan dan Pembungkusan Cangkerang Tart Telur Beku. Kulit tart telur beku yang didebentuk memasuki garisan di Zon 1 pada kadar sehingga 200 keping seminit. Sistem penglihatan di Zon 2 mengenal pasti dan menolak cengkerang yang rosak atau cacat (biasanya kurang daripada 2% daripada output dalam garisan pembentukan yang diselenggara dengan baik). Robot SCARA di Zon 3 meletakkan cengkerang yang diterima ke dalam dulang plastik 6 rongga atau 12 rongga yang diindeks pada penghantar selari dengan ketepatan kedudukan dulang ±0.5 mm. Barisan yang telah siap menghantar dulang berlabel yang dimeterai sedia untuk pengedaran rantaian sejuk. Lihat huluanBarisan pengeluaran pembentukan tart telur gaya Hong Konguntuk konteks tentang cara cengkerang terbentuk dihasilkan sebelum memasuki sistem pengisihan dan pembungkusan ini.
Penyepaduan kawalan: Keseluruhan barisan berjalan pada PLC penyeliaan tunggal dengan HMI skrin sentuh 21 inci. Sub-pengawal setiap zon berkomunikasi dengan PLC penyeliaan melalui PROFINET. Pengendali boleh memantau pemprosesan zon demi zon, sejarah penggera, kadar penolakan dan metrik OEE (Keberkesanan Peralatan Keseluruhan) dalam masa nyata. Sistem ini menyokong penyimpanan resipi untuk berbilang SKU produk; pertukaran antara SKU hanya memerlukan pilihan resipi pada HMI serta pengesan akhir fizikal dan perubahan format dulang, boleh dicapai dalam masa kurang dari 15 minit.
Jejak kaki dan utiliti: Barisan penuh untuk cengkerang tart telur menduduki kira-kira 15–20 m panjang dan 3–4 m lebar. Keperluan kuasa ialah 380V tiga fasa, 50 Hz, biasanya 15–25 kW jumlah beban bersambung. Udara termampat pada 0.6 MPa diperlukan untuk penggerakkan penggenggam dan pengapit dulang pneumatik. Sambungan air untuk CIP (Clean-In-Place) adalah pilihan bergantung pada klasifikasi zon kebersihan kemudahan.
Barisan pembungkusan pengisihan donat automatik di Hengjiang menggabungkan robot SCARA dan delta dalam konfigurasi terkoordinasi yang dioptimumkan khusus untuk ciri fizikal donat — bentuk bulat atau bujur, tekstur lembut boleh ubah bentuk, permukaan kaca yang berbeza-beza dan kelajuan talian tinggi daripada penggoreng atau kalis berkapasiti tinggi. Baris ini didokumentasikan dalampenggunaan gabungan robot SCARA dan deltabahagian portfolio stesen kerja bersepadu Hengjiang.
Mengapa donat memerlukan barisan khusus: Donat memberikan cabaran pengendalian yang unik. Permukaannya yang lembut dan melekit menjadikan pemilihan cawan vakum kritikal — terlalu banyak sedutan mengubah bentuk produk; terlalu sedikit menyebabkan jatuh. Geometri bulat mereka bermakna kawalan orientasi kurang kritikal berbanding produk arah, tetapi jarak yang konsisten dalam dulang pembungkusan adalah penting untuk pembentangan. Barisan donat volum tinggi (penggoreng industri yang menghasilkan 3,000–6,000 keping sejam) memerlukan kluster robot yang mampu melakukan pemprosesan berterusan tanpa kemerosotan prestasi berkaitan keletihan berbanding operasi berbilang syif.
Konfigurasi talian untuk donat: Robot Delta mengendalikan tugas pick-and-place berkelajuan tinggi utama daripada penghantar suapan keluar penggoreng ke dalam dulang perantaraan. Kadar kitaran mereka sebanyak 60–100 pemetik seminit seunit, digabungkan dalam kluster tiga atau empat robot, sepadan dengan kadar keluaran penggoreng industri. Robot SCARA kemudian mengendalikan tugas sekunder: memilih donat yang telah diisih daripada dulang perantaraan dan meletakkannya ke dalam pembungkusan runcit dengan orientasi yang tepat, pengesahan kiraan dan susunan lapisan. Pembahagian kerja ini memainkan kekuatan setiap jenis robot — delta untuk kelajuan mentah, SCARA untuk penempatan ketepatan dan muatan yang lebih berat.
Keserasian kaca: Perkakas pengesan akhir dalam barisan donat direka bentuk untuk permukaan berlapis, bersalut gula dan biasa. Cawan sedutan silikon dengan pengawal selia vakum boleh laras mengimbangi variasi permukaan. Algoritma normalisasi pantulan sistem penglihatan mengendalikan variasi kontras antara kaca matte dan berkilat tanpa memerlukan penentukuran berasingan bagi setiap varian produk.
Penyepaduan dengan barisan pembentukan: Barisan pembungkusan ini antara muka terus dengan HengjiangBarisan pengeluaran membentuk donat, mewujudkan rantaian pengeluaran-ke-pembungkusan yang berterusan. Hengjiang menawarkan penghantaran projek turnkey yang meliputi kedua-dua barisan pembentukan dan barisan pengisihan dan pembungkusan di bawah satu kontrak, dengan pentauliahan bersatu dan latihan pengendali.
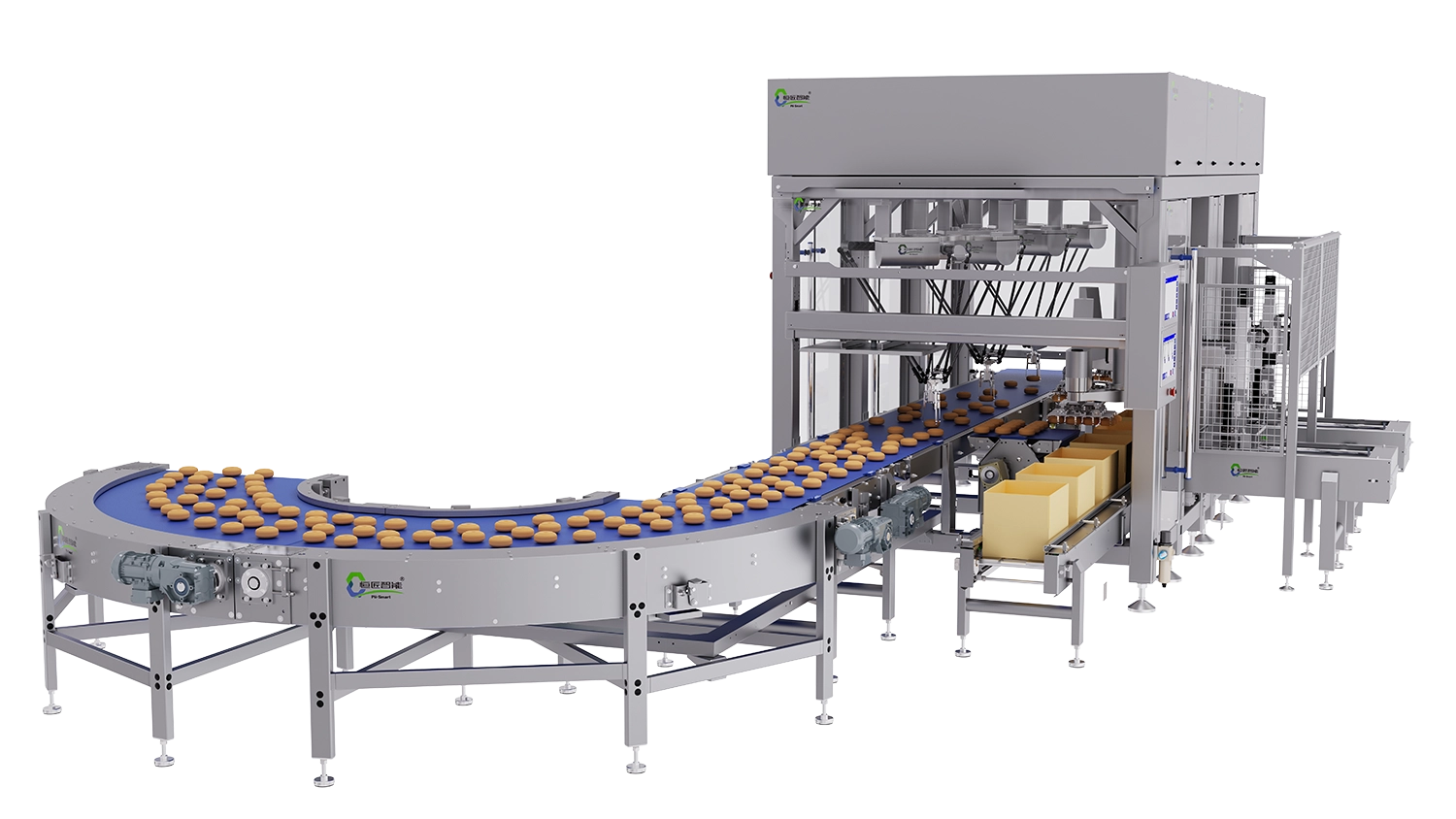
Yangbarisan pembungkusan pengisihan pizza automatikdi Hengjiang menggunakan penggunaan robot delta dwi-unit atau berbilang unit untuk mengendalikan pengisihan dan pembungkusan pizza beku, menangani cabaran khusus produk makanan rata berdiameter besar yang mesti dimasukkan ke dalam kadbod dengan ketepatan tahap milimeter.
Cabaran pengendalian khusus pizza: Piza sejuk beku adalah besar (diameter 200–350 mm biasanya), agak berat berbanding donat atau pastri (200–500 g seunit), dan mesti dimasukkan ke dalam lengan kadbod toleransi rapat tanpa kerosakan tepi pada lapisan topping atau kerak. Dimensi dalaman kadbod pembungkusan hanya meninggalkan kelegaan 3–5 mm pada setiap sisi, bermakna ketepatan dan kebolehulangan penempatan robot mestilah lebih ketat daripada toleransi pelepasan. HJ-D11003-1 Hengjiang dengan paksi berputar mencapai kebolehulangan penempatan ±0.5 mm dalam satah XY pada kelajuan operasi penuh — dalam toleransi yang diperlukan untuk format kadbod pizza standard.
Konfigurasi delta dwi-unit dan berbilang unit: Barisan pizza yang didokumentasikan dalam portfolio Hengjiang termasuk Talian Pengisihan dan Pembungkusan Pizza A dan Talian Pengisihan dan Pembungkusan Pizza B, mewakili peringkat pemprosesan dan konfigurasi susun atur yang berbeza. Talian A menggunakan kluster delta dua robot untuk talian berkapasiti sederhana (800–1,500 pizza sejam). Talian B menggunakan kluster tiga atau empat robot untuk talian berkapasiti tinggi yang sepadan dengan output ketuhar dek industri atau sistem pembakar terowong. Kedua-dua barisan menggunakan visi dan seni bina kawalan yang sama, berbeza hanya dalam kiraan robot dan lebar penghantar.
Pendirian dan pengedap kadbod: Barisan pembungkusan menyepadukan pendirian kadbod automatik di salur masuk zon pembungkusan, modul pemuatan robot di mana robot delta meletakkan piza ke dalam kadbod yang didirikan, dan stesen pengedap gam cair panas di alur keluar. Sistem pelabelan cetak dan gunakan menggunakan maklumat berubah-ubah (kod kelompok, tarikh terbaik sebelum, berat) sejurus selepas pengedap. Keseluruhan urutan daripada pemetik pizza kepada kadbod tertutup berlabel selesai dalam masa kurang daripada 8 saat setiap unit pada talian berkapasiti tinggi.
Pertimbangan zon sejuk: Barisan pizza sejuk beku beroperasi dalam zon pengeluaran suhu rendah (biasanya 0°C hingga 10°C ambien). Robot delta Hengjiang ditentukan dengan gris suhu rendah untuk semua permukaan galas dan belitan motor tertutup yang dinilai untuk operasi berterusan dalam persekitaran bilik sejuk. Pengurusan pemeluwapan dalam kabinet elektrik menggunakan pemanas terkawal termostatik untuk mengelakkan pengumpulan lembapan semasa peralihan suhu.
Penyepaduan huluan: Barisan pengisihan dan pembungkusan pizza bersambung terus ke Hengjiang'sbarisan pengeluaran membentuk pizzadan output terowong pembakar yang berkaitan. Ini membolehkan projek automasi kilang pizza yang lengkap diperoleh daripada pembekal tunggal, memudahkan pengurusan projek, tanggungjawab waranti dan penyelarasan perkhidmatan jangka panjang.
Untuk demonstrasi video kedua-dua konfigurasi barisan pizza yang beroperasi, lawatiBahagian Video Robot Pembakar.
Hengjiang Intelligent Technology Co., Ltd. ialah pengeluar bersepadu secara menegak: reka bentuk mekanikal, pembangunan pemacu servo, perisian kawalan gerakan robot, algoritma penglihatan mesin dan penyepaduan sistem semuanya dilakukan secara dalaman. Ini bermakna tiada risiko keserasian antara pembekal dalam antara muka kritikal antara robot, penglihatan dan kawalan — titik kegagalan biasa dalam sistem bersepadu pihak ketiga.
Semua peralatan menjalani ujian penerimaan kilang (FAT) yang ketat di kemudahan Hengjiang sebelum penghantaran, mensimulasikan keadaan pengeluaran pelanggan dengan produk perwakilan. Pemasangan dan pentauliahan dilakukan oleh pasukan teknikal Hengjiang sendiri. Sokongan selepas pentauliahan termasuk pemantauan jauh melalui platform kawalan yang didayakan IoT, dengan akses masa nyata kepada log kerosakan, data kitaran dan metrik prestasi. Untuk penerangan penuh tentang rangka kerja perkhidmatan — termasuk protokol pemeriksaan peralatan, piawaian pemasangan dan syarat jaminan — rujukPerkhidmatan dan sokonganhalaman.
Hengjiang juga menawarkan barisan pengeluaran penaik lengkap yang meliputi kategori pastri, croissant, tart telur, donat, pizza dan pai. Apabila barisan pengisihan dan pembungkusan robotik dipasangkan dengan barisan pembentuk dan pembakar Hengjiang, hasilnya ialah sel kilang pintar automatik sepenuhnya dengan satu titik akauntabiliti teknikal. Terokai sepenuhnyaPortfolio barisan pengeluaranuntuk pilihan peralatan huluan, atau lawatiHalaman syarikat Kumpulan Hexeonuntuk latar belakang syarikat, kapasiti pembuatan dan maklumat budaya.
Untuk pertanyaan khusus produk, perbincangan harga atau pengaturan lawatan kilang, gunakanHalaman perhubunganuntuk menghubungi pasukan jualan teknikal Hengjiang secara langsung.